Kellett XR-8 |
août 1944 |
") |
Vue d'un hélicoptère expérimental Kellett XR-8 "Egg Beater" à hélices croisées non concentriques. |
Le Kellett XR-8 (désigné ultérieurement XH-8) était un hélicoptère expérimental conçu par William Wallace Kellett (1891-1951), et construit par la compagnie Kellett Autogiro Corporation aux Etats-Unis durant la Deuxième Guerre mondiale. Cette machine biplace était destinée à démontrer la faisabilité d'un système à deux rotors. Le concept fut validé, mais les nombreux problèmes rencontrés empêchèrent le développement ultérieur de cette machine à architecture particulière.
La démonstration réussie du Sikorsky VS-300 poussa l'U.S.A.A.F. à préférer l'hélicoptère plutôt que l'autogire dans le domaine des voilures tournantes. Tenant compte de cette approche, la compagnie Kellett Autogiro Corporation, fit une proposition à l'armée américaine, en novembre 1942, pour le développement d'une machine à deux rotors, formule permettant de supprimer le rotor de queue supposé être cause d'une perte de puissance. Après examen théorique et tests effectués par la Experimental Engineering Section de l'Armée, un contrat fut passé en janvier 1943 pour la construction de deux prototypes dotés de rotors tripales, avec comme solution de rechange une machine à rotors à deux pales.
L'appareil résultant avait un fuselage compact de forme ovoïde portant une unique dérive de queue et doté d'un train d'atterrissage tricycle. Le cockpit très largement vitré contenait deux sièges côte à côte pour les pilotes. Les deux hélices tournant en sens inverse l'une de l'autre étaient montées sur des arbres formant un V avec un angle très aigu. Elles étaient également décalées d'1/6e de tour de manière à de pas se heurter. Le fuselage était basé sur une structure de tubes métalliques, avec un revêtement formé de panneaux métalliques et de parties entoilées. Les pales du rotor étaient basées sur des nervures en contreplaqué avec revêtement de même matériau et attachées à des éléments cylindriques métalliques. Les deux rotors entrelacés tournant rapidement valurent à cette machine le surnom "Egg Beater", elle fut aussi surnommée Synchropter par les pilotes.
Le premier vol fut effectué début août 1944 avec le chef pilote d'essai de chez Kellett, Dave Driscoll, aux commandes. Un manque de stabilité directionnelle fut détecté puis corrigé avec l'ajout de deux dérives complémentaires placées à l'arrière du fuselage. Un problème plus sérieux fut constaté début septembre, avec un choc entre les pales des deux rotors alors que l'appareil était en vol. A la suite, fut ordonné la construction d'un nouveau système à rotor rigide pour le XR-8. Dans le même temps, la version à rotors à deux pales fut essayée sur le deuxième prototype, avec des essais à partir de mars 1945. Cette machine se révéla vite inexploitable à cause de fortes vibrations excessivement difficiles à résorber. Aussi, il devint évident que l'adaptation du rotor rigide allait demander une refonte étendue de l'appareil et cette version fut abandonnée.
Fin janvier 1946, l'hélicoptère XR-8 fut accepté pour des essais avec ses rotors d'origine souples. Cependant le comportement en vol de cette machine était toujours aussi peu satisfaisant et le programme fut finalement abandonné en mars 1946 au profit de celui du Kellett XR-10 équipé des deux moteurs montés dans des nacelles. Au final, cet appareil fut construit en nombre très réduit, version initiale XR-8, version à rotors à deux pales XR-8A, et version à rotor rigide qui ne fut pas construite XR-8B.
La technologie des rotors entrecroisés avait été développée, en Allemagne, par Anton Flettner, d'abord avec le Fl 265 de 1939, puis avec le plus connu Fl 282 Kolibri, hélicoptère de reconnaissance et d'observation qui avait volé en 1940. A la fin de la Deuxième Guerre mondiale, deux machines de ce dernier type furent transférés aux Etats-Unis comme prises de guerre et servirent à la société Kaman (hélicoptères Huskie et KMax).
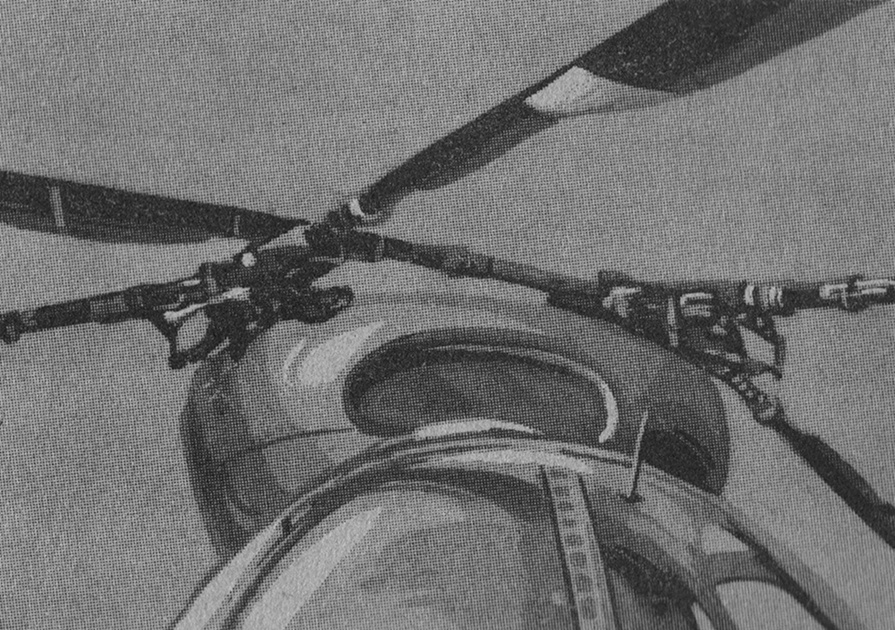
- En complément, vue frontale de la fixation des deux rotors du XR-8. Les pales des hélices passaient au-dessus des moyeux opposés, les deux hélices étant régularisées et décalées d'1/6e de tour par couplage mécanique (transmission directe par engrenages coniques). La distance entre les deux moyeux était de 1,22 mètres.
{kind=link}
Source partielle : site web Wikipedia.
| XR-8 | |||
| Moteurs(s)/Engine(s) | 1 moteur à pistons de 245 ch | Franklin O-405-9 |
| Diamètre rotor/Rotor diameter | 10,90 m (35 ft 9.1 in) | Longueur/Length | 6,90 m (22 ft 7.7 in) | Hauteur/Height | 3,40 m (11 ft 1.9 in) | Poids total/Weight | 1.350 kg (2,980 lb) |
| Vitesse/Speed | 160 km/h (100 mph) | Plafond/Ceiling | 2.050 m (6,730 ft) | Autonomie/Range | Endurance/Endurance |
| Index |